1. Single-Arm Instructional Video
2. Install the Robotic Arm
Secure the robotic arm to the table using clamps. Ensure there is a distance of one arm's length between the master arm and the follower arm to prevent interference (placement: master arm on the right, follower arm on the left).

3. Check Power and Data Cables
Connect the power and data cables, and verify the red indicator light is illuminated (securing the development board to the base with zip ties is recommended to prevent short circuits).

4. Configure Port Numbers
Find Master/Follower Arm Port Numbers
ls /dev/ttyACM*This command displays all active ports. Unplug the target USB cable and rerun the command to identify the specific port.
python lerobot/scripts/find_motors_bus_port.py
Critical: Always grant port permissions:
sudo chmod 777 /dev/ttyACM*Find Camera ID
python lerobot/common/robot_devices/cameras/opencv.py --images-dir outputs/images_from_opencv_cameras
Modify Configuration File

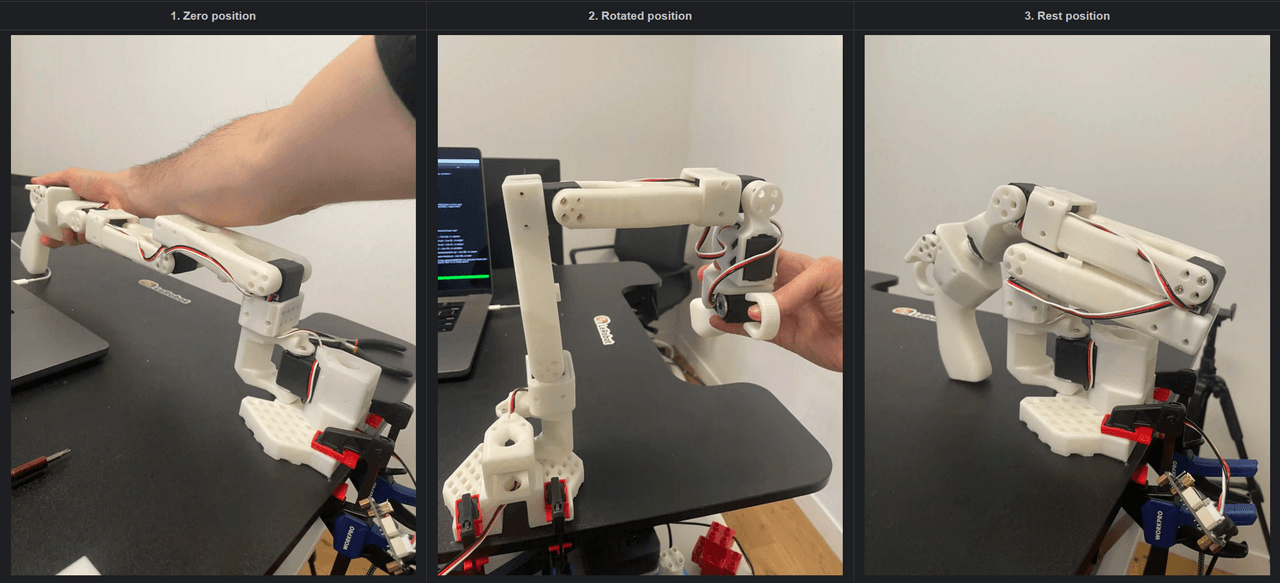
5. Arm Calibration
python lerobot/scripts/control_robot.py \
--robot.type=so100 \
--robot.cameras='{}' \
--control.type=calibrate \
--control.arms='["main_follower"]'
Warning: Clear
lerobot-main\.cache\calibration\so100 before calibration.6. Teleoperation
python lerobot/scripts/control_robot.py \
--robot.type=so100 \
--control.type=teleoperateCamera-free mode:
python lerobot/scripts/control_robot.py \
--robot.type=so100 \
--control.type=teleoperate \
--robot.cameras='{}'